Camera Calibration
Create the Board
import cv2
dictionary = cv2.aruco.getPredefinedDictionary(cv2.aruco.DICT_6X6_250)
board = cv2.aruco.CharucoBoard_create(squaresX=5,
squaresY=7,
squareLength=0.04,
markerLength=0.02,
dictionary=dictionary)
img = board.draw((600, 500), marginSize=10, borderBits=1)
cv2.imwrite('board.png', img)
Output:

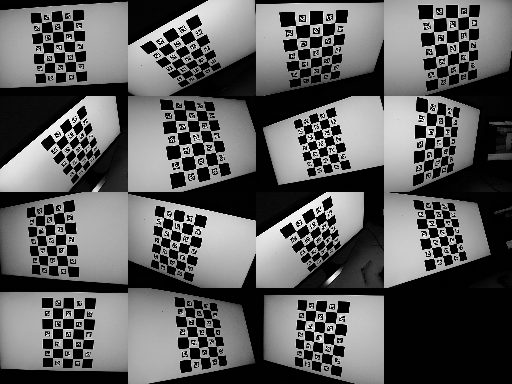
Capture images
import cv2
cap = cv2.VideoCapture(0)
k = -1
i = 0
while k != 27:
ret, frame = cap.read()
if ret:
cv2.imshow('', frame)
k = cv2.waitKey(1)
if ret and k == 32:
cv2.imwrite('img-{}.png'.format(i), frame)
i += 1
Output:
Calculate camera parameters
import cv2
import glob
import numpy as np
BOARD_SIZE = (5, 7)
criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.0001)
objp = np.zeros((BOARD_SIZE[0] * BOARD_SIZE[1], 3), np.float32)
objp[:, :2] = np.mgrid[0:BOARD_SIZE[0], 0:BOARD_SIZE[1]].T.reshape(-1, 2)
objpoints = [] # 3d point in real world space
imgpoints = [] # 2d points in image plane.
calibration_images_files = glob.glob('img-*.png')
for calibration_image_file in calibration_images_files:
image = cv2.imread(calibration_image_file, cv2.IMREAD_GRAYSCALE)
patternfound, corners = cv2.findChessboardCorners(image, BOARD_SIZE, None)
if patternfound:
corners2 = cv2.cornerSubPix(image,
corners,
(11, 11),
(-1, -1),
criteria)
objpoints.append(objp)
imgpoints.append(corners2)
ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(objpoints,
imgpoints,
image.shape[::-1],
None,
None)
print mtx
print dist
Example output:
[[552.46232123 0. 373.69205778]
[ 0. 557.98743082 221.56448225]
[ 0. 0. 1. ]]
[[ 1.14277568e+00 -1.21525625e+01 -2.35406466e-03 5.71528720e-04
2.94663019e+01]]