Control Theory
The Goal of control theory is to pick control actions in an optimum manner without delay or overshoot and ensuring control stability [1]
PID - Control
Example: Controlling a car to drive along x-axis
P ... Proportional
control_action = -Kp * error
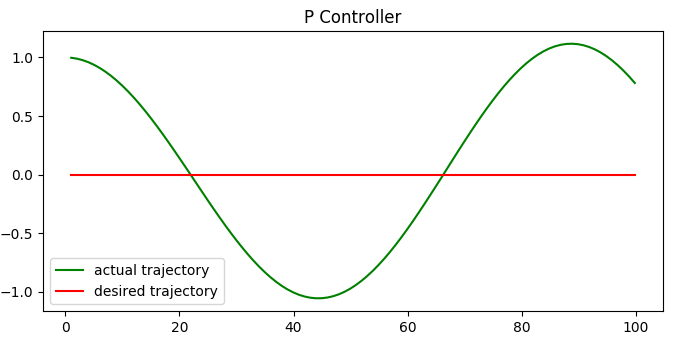
- Problem: Overshoot
- Solution: Add differential
D ... Differential
control_action = -Kp * error - Kd * diff_error
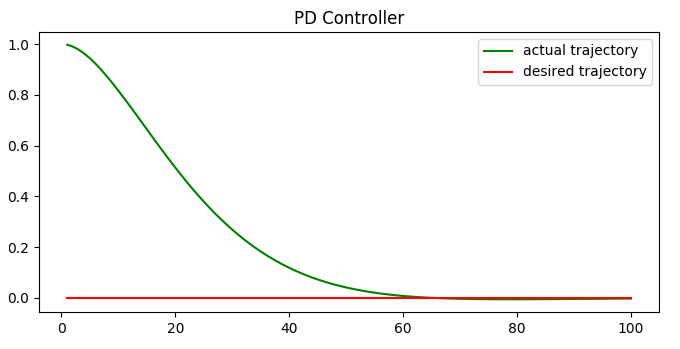
- Another problem: system bias. Example: Car wheels are off-center
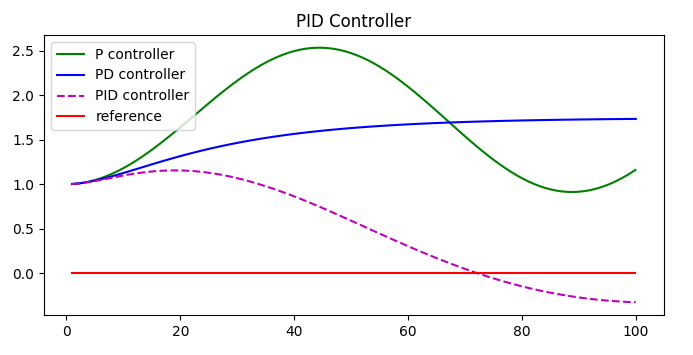
- Solution: Add an Integral Part
I ... Integral
control_action = -Kp * error - Kd * diff_error - Ki * sum_error
Source Code
prev_error = robot.y
sum_error = 0
dt = 1.0
# Simulation loop
for i in range(n):
error = robot.y
diff_error = (error - prev_error) / dt
sum_error += error
steer = -Kp * error - Kd * diff_error - Ki * sum_error
robot.move(steer, speed)
Finding good PID parameter values
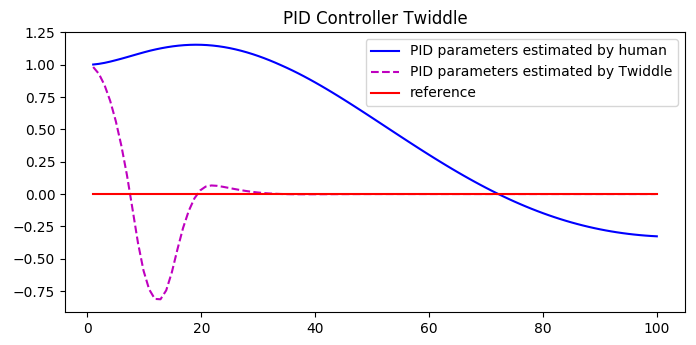
Step 1: Have a cost function which tells how "good" the PID parameters are. For instance the mean cross track error over some simulation period can be used.
def cost_func(robot, params, n=100, speed=1.0):
prev_error = robot.y
sum_error = 0
mean_error = 0
# Give the algorithm a chance to converge to 0 in n steps
# Only from then on calculate the mean error
for i in range(2*n):
error = robot.y
sum_error += error
diff_error = (error - prev_error) / speed
steer = -params[0] * error - params[1] * diff_error - params[2] * sum_error
robot.move(steer, speed)
prev_error = error
if i >= n:
mean_error += error ** 2
return mean_error / n
Step 2: Implement the twiddle algorithm. The basic idea is to iterate over the parameters and then try out a value for the paramter which is dp above the parameter and dp below. If the change in value gives lowest cost so far then this parameter value is kept and dp is increased otherwise dp is decreased.
def twiddle(tol=0.2):
p = [0, 0, 0]
dp = [1, 1, 1]
robot = make_robot()
x_trajectory, y_trajectory, best_err = run2(robot, p)
it = 0
while sum(dp) > tol:
print("Iteration {}, best error = {}".format(it, best_err))
for i in range(len(p)):
p[i] += dp[i]
robot = make_robot()
err = cost_func(robot, p)
if err < best_err:
best_err = err
dp[i] *= 1.1
else:
p[i] -= 2 * dp[i]
robot = make_robot()
err = cost_func(robot, p)
if err < best_err:
best_err = err
dp[i] *= 1.1
else:
p[i] += dp[i]
dp[i] *= 0.9
it += 1
return p
Step 3: Run twiddle:
Kp, Kd, Ki = twiddle()